MY ROBOT, so far ...
last updated: March 5, 2005
Pictures
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Older pictures
1,
2,
3,
4,
5,
6,
7,
8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
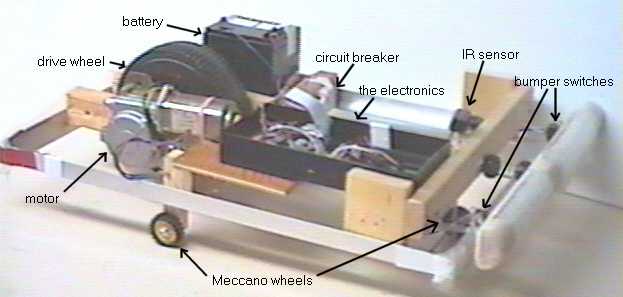
Features
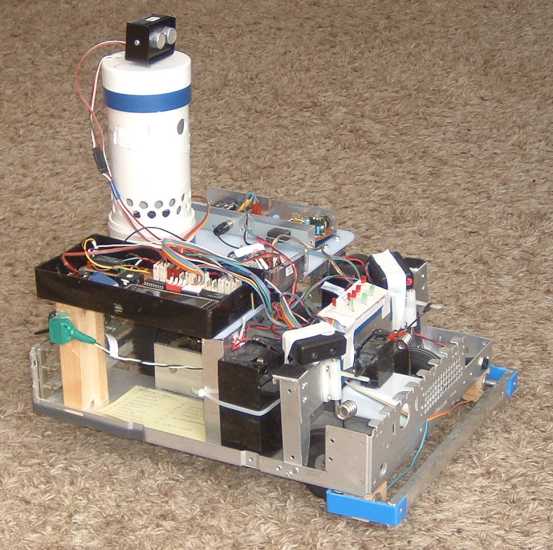
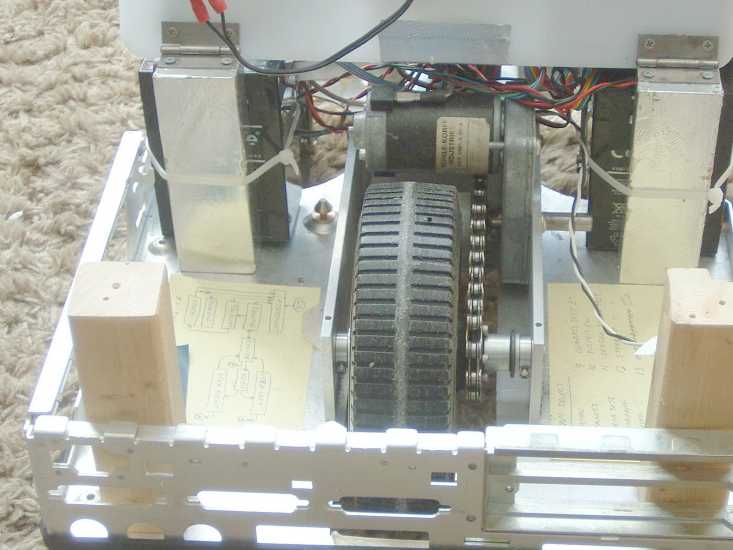
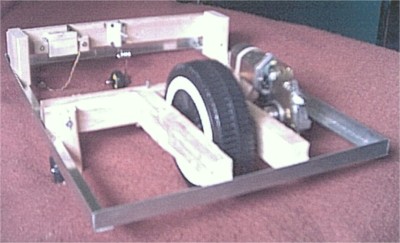
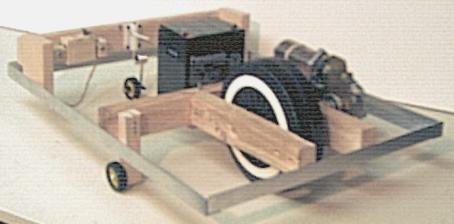
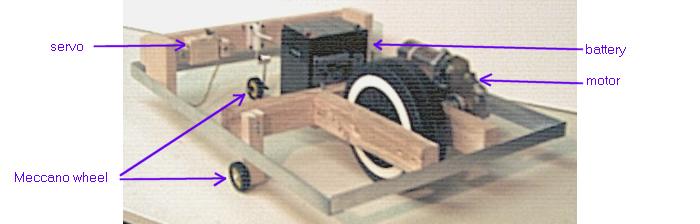
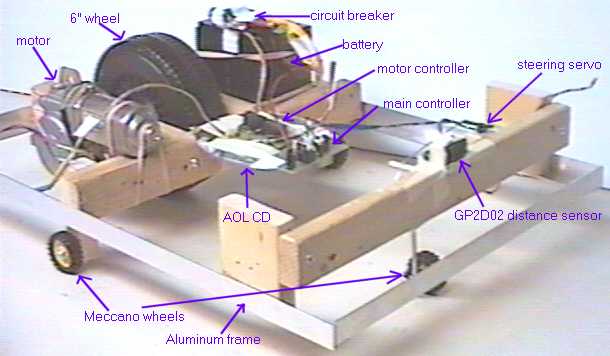
The drive system It has 2 wheels in the front that steer like a car, and 1 drive wheel in the back. This has a few advantages, but also has it's drawbacks.
Modular designMost sections of the robot can be easily removed and operated by conecting to a PC with a serial cable. This includes: the drive mechanism and motor control, sound module, RF unit, the display, voltage monitor and servo controler, 5V switching power supply
Sound
The sound module can hold up to 8 minutes worth of sound. It currently contains 115 words, phases and sound effects.
The source code
version 9.0, Nov. 25, 2004
- main.h - defines,function list, global variables
- robot.c - initialization ("main"), support functions
- states.c - the behavior - as the robot wanders around, control is passed from one "state" to another. The display will always show the name of the current state. There are 11 states and they're in this file
- alt.c - test/demo programs