My Robot
The Robomagellan Version
last updated: june 5, 2012

The Behavior
The behavior is divided into 5 states. It starts in Standby state and switches to other states depending on the situation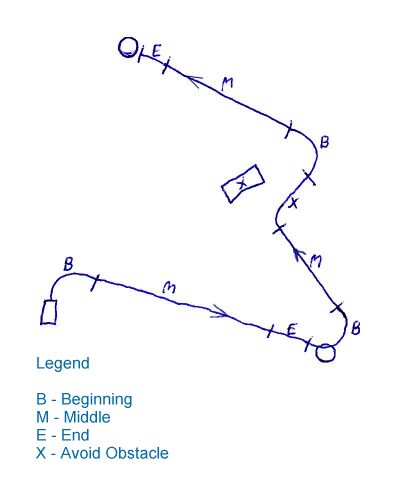
Standby
- Keep the robot still
- Allow the operator to enter course information and run tests from the wireless terminal.
- When the operator presses G on the keypad, switch to Beginning
- Determine the heading needed to get to the waypoint
- Turn until facing the waypoint
- Straighten the front wheels
- switch to Middle
- Full speed ahead
- Steer to maintain the desired heading using the compass
- Every 10 seconds, update the heading using GPS
- Watch for obstacles. If getting close to one, switch to Avoid Obstacle
- If close to the waypoint, switch to End
- Move forward a couple of meters at half speed.
- Stop
- Wait a couple of seconds.
- Get co-ordinates of next waypoint if any
- If there's another waypoint, switch to Beginning, otherwise switch to Standby.
- Turn away from the obstacle
- Go straight until the obstacle is no longer in sight while looking to the side
- Switch to Beginning
Telemetry
 It can be hard to tell what the robot is thinking while it's running the course, so it transmits information to the wireless terminal. To avoid information overload, single characters are sent at a rate that is easy to interpret.
It can be hard to tell what the robot is thinking while it's running the course, so it transmits information to the wireless terminal. To avoid information overload, single characters are sent at a rate that is easy to interpret.
The numbers in magenta show the number of the waypoint the robot is trying to get to. The letters B,M,E and X show what state has just become active. The G in red means the heading has been recalculated using the GPS. The digits indicate the remaining distance to the waypoint in metres and are sent at the rate of 1 per second. Only the tens digit is shown.
Video
The robot heading for a waypoint (Note: the back and forth motion has been corrected)Misc.
By the way, did you notice the spectator in the top picture? Most people don't.